Hongzheng Chen Blog
TVM - GEMM优化
Mar 20th, 2020 0本文记录如何使用TVM v0.6在CPU上优化GEMM,节选自TVM官方教程。类似地,可参考Vivado HLS优化GEMM的方法。其中涉及到局部性(locality)的问题会详细进行分析。
朴素GEMM
我们可以将朴素GEMM,写成下列这种伪代码形式,用爱因斯坦求和记号(einsum)即$C_{ij}=A_{ik}B_{kj}$
for (i, 0, M)
for (j, 0, N)
for (k, 0, K)
C[i][j] += A[i][k] * B[k][j]
可先写出朴素的NumPy和TVM实现,并比较它们的运行时间。
输出结果如下,可以看到numpy的速度(调用Intel MKL)是比裸GEMM实现$O(n^3)$要快得多的。
produce C {
for (x, 0, 1024) {
for (y, 0, 1024) {
C[((x*1024) + y)] = 0f
for (k, 0, 1024) {
C[((x*1024) + y)] = (C[((x*1024) + y)] + (A[((x*1024) + k)]*B[((k*1024) + y)]))
}
}
}
}
Numpy running time: 0.007936
Baseline: 2.890711
接下来我们仔细分析下其中的瓶颈。
循环重排(reordering)
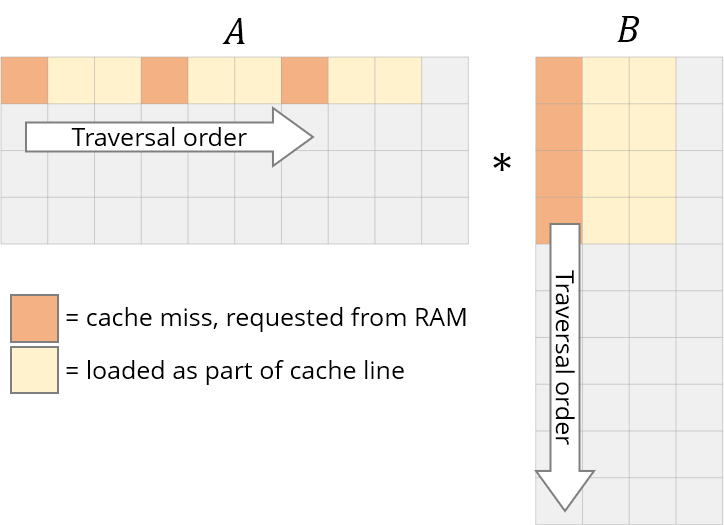
注意到我们访问数据的模式,对于C和A矩阵来说,我们都是采用逐行遍历数据的方式,而对于B则是逐列遍历数据。

但是通常情况下,在计算机里我们采用的都是行优先(row-major)存储。如果一个cache line可以装8*int(32B),那么按行遍历(正Z型),可以保证每8个访存只有第1个元素miss;而按列遍历,很有可能读入的行数据没有用到就被驱逐出去了,miss rate为100\%。
故一个简单但极其有效的方式就是修改遍历顺序,即循环重排。
for (i, 0, M)
for (k, 0, K)
for (j, 0, N)
C[i][j] = A[i][k] * B[k][j]
计算结果显然是一样的,但是重排之后,B也变成了行遍历,进而提升了空间局部性,如下图。

我们分析下这种模式:
- 重复扫C数组K次,每次扫同一行(时间局部性好)
- A的时间局部性同样很高,因为
A[i][k]被重复用了N次 - B则是确保了行优先存储下的空间局部性
只需要在TVM中添加一行
s[C].reorder(C.op.axis[0], k, C.op.axis[1])
即可实现循环重排。计算结果如下,可以看到k循环确实放到了中间层,并且速度提升了15倍!
produce C {
for (x, 0, 1024) {
for (y.init, 0, 1024) {
C[((x*1024) + y.init)] = 0f
}
for (k, 0, 1024) {
for (y, 0, 1024) {
C[((x*1024) + y)] = (C[((x*1024) + y)] + (A[((x*1024) + k)]*B[((k*1024) + y)]))
}
}
}
}
Opt1: 0.190684
循环平铺(tiling)
再来仔细分析下GEMM的三重循环,虽然我们改变了循环顺序,从而提升了C数组的时间局部性,但是要让这种局部性成立,必须使前面加载进来的元素不会被替换出去。
还是考虑仅一个cache line里8个int的例子,最好的情况是1-8一直驻留在cache中,要不然当访问到9时,1就会被剔除。这样来看,最好的情况则是保证数组遍历始终控制在一个很小的范围内,而这个范围由cache大小决定,以保证数组元素能全部驻留在cache中。
类似的道理可分析A和B数组,当A进入到下一行时,B又得从头重新遍历整个矩阵,那么它的重用度/时间局部性是非常差的,因为cache的容量限制,加载进来的元素在后面计算时会被驱逐,当要用时才重新加载回来,造成频繁的cache抖动(thrashing)。
因此解决方式上面已经提了,就是对cache进行分块(blocking),通过计算小矩阵来提升重用性,确保所有数据都能落在cache中。
将大矩阵C分块,每个块大小64*64(超参数需要尝试),这样一共占用$2^6\cdot 2^6\cdot 4B=2^{14}B=16KB$的cache容量(按float来计算),而L1 cache现在都做得非常大了,比如我电脑Intel Core i7 CPU的L1 cache已经达到256KB,存储这些数据绰绰有余。
i和j维度可以用tile进行分块,k由于是单一维度,故用split将一个轴分划为两个轴(分割因子为factor),进而可以写出对应的TVM代码。
# Blocking by loop tiling
bn = 64
xo, yo, xi, yi = s[C].tile(C.op.axis[0], C.op.axis[1], x_factor=bn, y_factor=bn)
k, = s[C].op.reduce_axis
ko, ki = s[C].split(k, factor=4)
# Hoist reduction domain outside the blocking loop
s[C].reorder(xo, yo, ko, ki, xi, yi)
运行结果如下,可以看到提升并不是很明显。(这说明调参也是技术活)
produce C {
for (x.outer, 0, 16) {
for (y.outer, 0, 16) {
for (x.inner.init, 0, 64) {
for (y.inner.init, 0, 64) {
C[((((x.outer*65536) + (x.inner.init*1024)) + (y.outer*64)) + y.inner.init)] = 0f
}
}
for (k.outer, 0, 128) {
for (k.inner, 0, 8) {
for (x.inner, 0, 64) {
for (y.inner, 0, 64) {
C[((((x.outer*65536) + (x.inner*1024)) + (y.outer*64)) + y.inner)] = (C[((((x.outer*65536) + (x.inner*1024)) + (y.outer*64)) + y.inner)] + (A[((((x.outer*65536) + (x.inner*1024)) + (k.outer*8)) + k.inner)]*B[((((k.outer*8192) + (k.inner*1024)) + (y.outer*64)) + y.inner)]))
}
}
}
}
}
}
}
Opt2: 0.175358
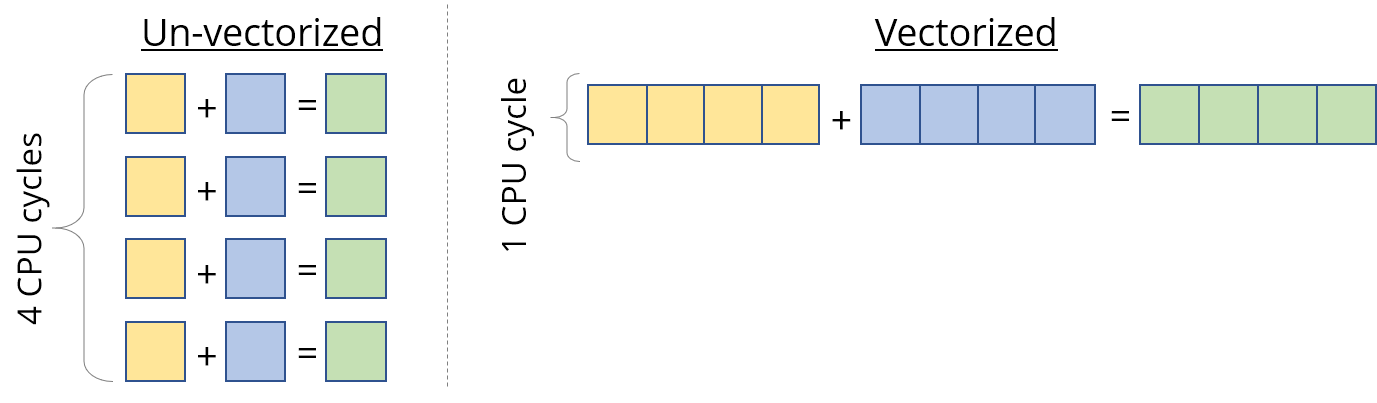
向量化(vectorization)
现代的CPU大多都支持SIMD,因此可以通过向量化的方式,来加速计算。
在TVM中只需添加下面一行即可实现最内层循环的向量化。
s[C].vectorize(yi)
结果如下,同样没有提升,很大原因是构造SIMD也是有数据搬移开销的。
produce C {
for (x.outer, 0, 16) {
for (y.outer, 0, 16) {
for (x.inner.init, 0, 64) {
C[ramp((((x.outer*65536) + (x.inner.init*1024)) + (y.outer*64)), 1, 64)] = x64(0f)
}
for (k.outer, 0, 64) {
for (k.inner, 0, 16) {
for (x.inner, 0, 64) {
C[ramp((((x.outer*65536) + (x.inner*1024)) + (y.outer*64)), 1, 64)] = (C[ramp((((x.outer*65536) + (x.inner*1024)) + (y.outer*64)), 1, 64)] + (x64(A[((((x.outer*65536) + (x.inner*1024)) + (k.outer*16)) + k.inner)])*B[ramp((((k.outer*16384) + (k.inner*1024)) + (y.outer*64)), 1, 64)]))
}
}
}
}
}
}
Opt3: 0.224174
注意到现在B的访问模式是序列的,而A变成了一列列的访问,这对cache不友好,因此通过改变ki和xi的顺序,可以让其变得友好些,即
s[C].reorder(xo, yo, ko, xi, ki, yi)
这回可以看到,运行时间又缩短了一半。
produce C {
for (x.outer, 0, 16) {
for (y.outer, 0, 16) {
for (x.inner.init, 0, 64) {
C[ramp((((x.outer*65536) + (x.inner.init*1024)) + (y.outer*64)), 1, 64)] = x64(0f)
}
for (k.outer, 0, 128) {
for (x.inner, 0, 64) {
for (k.inner, 0, 8) {
C[ramp((((x.outer*65536) + (x.inner*1024)) + (y.outer*64)), 1, 64)] = (C[ramp((((x.outer*65536) + (x.inner*1024)) + (y.outer*64)), 1, 64)] + (x64(A[((((x.outer*65536) + (x.inner*1024)) + (k.outer*8)) + k.inner)])*B[ramp((((k.outer*8192) + (k.inner*1024)) + (y.outer*64)), 1, 64)]))
}
}
}
}
}
}
Opt4: 0.107459
数组打包(packing)
因为前面我们已经执行了tiling,虽然这可以提升局部性,但是行与行之间的元素依然没有存储在一起,需要跳掉后面的元素才能访问到。因此,比较好的方法则是改变数组的排列方式,从而确保在同一个block里的元素在顺序内存里也是连续的。

对应的TVM代码如下。
# We have to re-write the algorithm slightly.
packedB = tvm.compute((N / bn, K, bn), lambda x, y, z: B[y, x * bn + z], name='packedB')
C = tvm.compute((M, N),
lambda x, y: tvm.sum(A[x, k] * packedB[y // bn, k, tvm.indexmod(y, bn)], axis=k),
name = 'C')
s = tvm.create_schedule(C.op)
# tiling
# spilting
# reorder
# vertorize
x, y, z = s[packedB].op.axis
s[packedB].vectorize(z)
s[packedB].parallel(x)
运行结果如下,这里稍微改了一下超参数(bn=32, factor=4),但性能还是没有显著提升。
// attr [packedB] storage_scope = "global"
allocate packedB[float32x32 * 32768]
produce packedB {
parallel (x, 0, 32) {
for (y, 0, 1024) {
packedB[ramp(((x*32768) + (y*32)), 1, 32)] = B[ramp(((y*1024) + (x*32)), 1, 32)]
}
}
}
produce C {
for (x.outer, 0, 32) {
for (y.outer, 0, 32) {
for (x.inner.init, 0, 32) {
C[ramp((((x.outer*32768) + (x.inner.init*1024)) + (y.outer*32)), 1, 32)] = x32(0f)
}
for (k.outer, 0, 256) {
for (x.inner, 0, 32) {
for (k.inner, 0, 4) {
C[ramp((((x.outer*32768) + (x.inner*1024)) + (y.outer*32)), 1, 32)] = (C[ramp((((x.outer*32768) + (x.inner*1024)) + (y.outer*32)), 1, 32)] + (x32(A[((((x.outer*32768) + (x.inner*1024)) + (k.outer*4)) + k.inner)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + (k.inner*32)), 1, 32)]))
}
}
}
}
}
}
Opt5: 0.109478
写缓存(cache)
在blocking之后,写C数组是按块写的,内存访问模式并非序列(sequential),因此可以通过利用一个序列cache来存储所有的block结果,然后当block结果都出来时再写到C中。TVM代码如下。
# Allocate write cache
CC = s.cache_write(C, 'global')
xo, yo, xi, yi = s[C].tile(C.op.axis[0], C.op.axis[1], x_factor=bn, y_factor=bn)
# Write cache is computed at yo
s[CC].compute_at(s[C], yo)
# New inner axes
xc, yc = s[CC].op.axis
k, = s[CC].op.reduce_axis
ko, ki = s[CC].split(k, factor=4)
s[CC].reorder(ko, xc, ki, yc)
s[CC].unroll(ki)
s[CC].vectorize(yc)
结果又是做了负向优化…
// attr [packedB] storage_scope = "global"
allocate packedB[float32x32 * 32768]
// attr [C.global] storage_scope = "global"
allocate C.global[float32 * 1024]
produce packedB {
parallel (x, 0, 32) {
for (y, 0, 1024) {
packedB[ramp(((x*32768) + (y*32)), 1, 32)] = B[ramp(((y*1024) + (x*32)), 1, 32)]
}
}
}
produce C {
for (x.outer, 0, 32) {
for (y.outer, 0, 32) {
produce C.global {
for (x.c.init, 0, 32) {
C.global[ramp((x.c.init*32), 1, 32)] = x32(0f)
}
for (k.outer, 0, 256) {
for (x.c, 0, 32) {
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[(((x.outer*32768) + (x.c*1024)) + (k.outer*4))])*packedB[ramp(((y.outer*32768) + (k.outer*128)), 1, 32)]))
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[((((x.outer*32768) + (x.c*1024)) + (k.outer*4)) + 1)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + 32), 1, 32)]))
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[((((x.outer*32768) + (x.c*1024)) + (k.outer*4)) + 2)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + 64), 1, 32)]))
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[((((x.outer*32768) + (x.c*1024)) + (k.outer*4)) + 3)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + 96), 1, 32)]))
}
}
}
for (x.inner, 0, 32) {
for (y.inner, 0, 32) {
C[((((x.outer*32768) + (x.inner*1024)) + (y.outer*32)) + y.inner)] = C.global[((x.inner*32) + y.inner)]
}
}
}
}
}
Opt6: 0.115978
并行化(parallelism)
最后可以利用多线程技术,在TVM中同样只用一行代码。
s[C].parallel(xo)
得到结果如下,终于达到0.1s以内。
// attr [packedB] storage_scope = "global"
allocate packedB[float32x32 * 32768]
produce packedB {
parallel (x, 0, 32) {
for (y, 0, 1024) {
packedB[ramp(((x*32768) + (y*32)), 1, 32)] = B[ramp(((y*1024) + (x*32)), 1, 32)]
}
}
}
produce C {
parallel (x.outer, 0, 32) {
// attr [C.global] storage_scope = "global"
allocate C.global[float32 * 1024]
for (y.outer, 0, 32) {
produce C.global {
for (x.c.init, 0, 32) {
C.global[ramp((x.c.init*32), 1, 32)] = x32(0f)
}
for (k.outer, 0, 256) {
for (x.c, 0, 32) {
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[(((x.outer*32768) + (x.c*1024)) + (k.outer*4))])*packedB[ramp(((y.outer*32768) + (k.outer*128)), 1, 32)]))
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[((((x.outer*32768) + (x.c*1024)) + (k.outer*4)) + 1)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + 32), 1, 32)]))
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[((((x.outer*32768) + (x.c*1024)) + (k.outer*4)) + 2)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + 64), 1, 32)]))
C.global[ramp((x.c*32), 1, 32)] = (C.global[ramp((x.c*32), 1, 32)] + (x32(A[((((x.outer*32768) + (x.c*1024)) + (k.outer*4)) + 3)])*packedB[ramp((((y.outer*32768) + (k.outer*128)) + 96), 1, 32)]))
}
}
}
for (x.inner, 0, 32) {
for (y.inner, 0, 32) {
C[((((x.outer*32768) + (x.inner*1024)) + (y.outer*32)) + y.inner)] = C.global[((x.inner*32) + y.inner)]
}
}
}
}
}
Opt7: 0.052135
比原来的baseline版本提升了58倍,但距离NumPy的MKL版本依然存在6.25倍的距离。
References
- TVM Tutorial: How to optimize GEMM on CPU
- TVM Tutorial: Schedule Primitives in TVM
- CSAPP第5章:优化程序性能,第6章:存储器层次结构
- Manas Sahni, Anatomy of a High-Speed Convolution, 中文